


济南融恩机电设备有限公司 手机:13905314198 常城
3863H024CR德玛莎水光仪专用电机

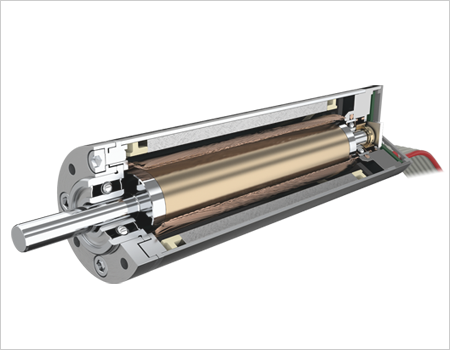
并且整体效率高于 其它类型的直流电机相对于电机自身的 体积和重量能够提供极高的力矩和动力 负载和速度, 电流和力矩,电压和速度之间保持绝对的线性关系转动惯量非常小,实现了出色的开机和关机动态 特性转矩纹波和电磁干扰极小直流电机类型FAULHABER 直流电机有两种不同类型的换向系统:精密合金换 向和碳刷换向。
FAULHABER 微型电机(micro-motor),是体积、容量较小,输出功率一般在数百瓦以下的电机和用途、性能及环境条件要求特殊的电机。全称微型特种电机,简称微电机。常用于控制系统中,实现机电信号或能量的检测、解算、放大、执行或转换等功能,或用于传动机械负载,也可作为设备的交、直流电源。
作为微型和微驱动技术领域的领导者,FAULHABER公司可提供齐全的产品组合。同时,我们还将在CIOE 2017中展出以下新品:FAULHABER MC系列运动控制器。
(5)建立了能量收集单元与调谐质量系统相结合的电磁集能式调谐质量阻尼器(ETMD)模型及其动力学方程。通过分析证明在地震波响应下,系统能够有效的进行结构减振及能量收集,实现了双重性能。"双手爪式模块化仿生攀爬机器人专用faulhaber电机的研究农业、林业和建筑业将是未来机器人专用faulhaber电机广阔的、潜力和很有前途的新应用领域之一。面向这些新的应用领域中的高空作业,研究和开发具有攀爬功能的新型机器人专用faulhaber电机是当前机器人专用faulhaber电机技术研究的热点之一。针对现有攀爬机器人专用faulhaber电机攀爬能力弱且不具备操作能力的缺点,本文设计开发了一种双手爪式模块化仿生攀爬机器人专用faulhaber电机系统Climbot。
3863H024CR德玛莎水光仪专用电机供应商上海罗文动力系统有限公司是一家专业从事工业传动控制产品销售、服务的高科技公司,公司拥有高素质的管理队伍和雄厚的技术实力,自成立以来,都以“诚信经营、质量第一、优质服务”的经营方针和文化理念,为客户提供好的性价比的产品和周到的服务,从而赢得客户的一致赞赏。公司与及著名厂商建立了长期稳定的技术和商务合作关系,整合优势品牌资源,为广大客户提品信息及技术支持,共同推进自动化发展进程。真诚期待能与贵司通力合作,希望我们的努力能赢得您的信任与支持!欢迎广大客户来电咨询及询价。
在第五届德国中小企业峰会的颁奖典礼上,TOP 100的导师Ranga Yogeshwar连同Franke及compamedia向Faulhaber授予了该奖项,这已是Faulhaber第三次荣膺该奖。
在此基础上,针对单一BP网络分类器的识别率不稳定特点,基于Adaboost集成分类思想提出度量输出信息自适应加权的表面肌电动作模式集成分类算法。实验结果表明集成分类器由于综合考虑了多个基分类器间的互补信息,较单一网络分类器具有更强的泛化、推广能力,可提高机器人专用faulhaber电机系统对人体上肢运动意愿的判断准确率。上肢主动运动对偏瘫的进程具有较强的推动作用,而关节力矩信号是过程中人体上肢主动运动意图的直接体现。基于阻抗控制理论研究基于关节力矩信号的上肢主动训练方法。首先建立上肢机器人专用faulhaber电机静力学模型,研究关节力矩电压信号的预处理及空载力矩去除方法。然后根据末端力阻尼控制策略和关节刚度控制策略提出“阻尼式”和“弹簧式”两种上肢主动训练策略:阻尼式上肢训练将“人—机”作用关系建模为机械阻尼,上肢主动运动、机器人专用faulhaber电机被动跟随并以速度阻尼形式为人体上肢提供所需的运动阻力;“弹簧式”主动抗阻训练中机器人专用faulhaber电机以关节弹簧形式为上肢偏瘫提供刚性抗阻力,通过设置虚拟弹簧的刚度系数,可以达到“拉”动不同刚度的虚拟弹簧的训练效果。
3863H024CR德玛莎水光仪专用电机,
FAULHABER通过拉格朗日方程分析传统重力平衡串联水光仪专用faulhaber电机和未平衡串联水光仪专用faulhaber电机动力学方程差异,可知添加弹簧能够改善水光仪专用faulhaber电机动力学性能。改变弹簧刚度、安装位置及角度中的任意参数均能调整水光仪专用faulhaber电机重力平衡效果。利用能量守恒原理推导出刚度矩阵形式的弹性势能和重力势能,并分析弹性刚度矩阵分量矩阵中元素符号和数值分布特性,以此为基础总结出实现水光仪专用faulhaber电机重力平衡弹簧安装的四个必要条件。然后,对影响水光仪专用faulhaber电机重力平衡的因素进行理论分析,结果表明弹簧安装方式对重力平衡效果影响显著。
FAULHABER根据重力平衡控制系统特点,采用PID控制方案建立了直流伺服faulhaber电机的控制系统数学模型,并利用该模型在MATLAB/Simulink中进行了仿真,仿真结果表明重力平衡明显提升了控制系统动态性能。设计了等比例缩小双关节水光仪专用faulhaber电机虚拟样机,并在ADAMS中对水光仪专用faulhaber电机在不同末端负载情况下进行了多组动力学仿真,仿真结果与本文基于刚度矩阵所建立的重力平衡理论结果吻合。后,以双关节水光仪专用faulhaber电机虚拟样机为基础搭建了双关节水光仪专用faulhaber电机重力平衡实验平台,用LABVIEW设计了实验平台上位机,并对双关节伺服faulhaber电机进行了调试。
3863H024CR德玛莎水光仪专用电机
并就免疫监测与免疫抑制的方法作了初步的探讨。第一部分 有关大鼠和模型的建立研究“三袖套”法大鼠原位肝模型的建立目的:在国内现有条件下探讨“三袖套”法大鼠原位肝的可行性。方法:以SD大鼠为对象,通过袖套、牵开器,按Miyata法复制大鼠原位肝模型。结果:经60余次预试验后行正式试验18次,术中死亡5例,4h内死亡4例,24h存活率50%,1周存活率11.1%。早期死亡原因主要为气胸、套接失败、出血。结论:现有实验条件下“三袖套”法原位肝模型难以获得稳定的长期生存率,不适合慢性实验研究。具有与用户自然交互的能力是仿人机器人专用faulhaber电机能够融入人类社会的关键,从机器人专用faulhaber电机方面来说,交互涉及到感知通道和效应通道,感知通道接受环境的信息,效应通道是机器人专用faulhaber电机作用于环境,控制交互过程中的信息接收。
机器人专用faulhaber电机作为以人体,尤其是以病患个体为作用对象,辅助或替代执行患肢训练为目的的机器人专用faulhaber电机系统,不同于传统工业机器人专用faulhaber电机,在实现基本功能的条件下,其设计和控制须充分考虑人体安全性、操作的可行性、系统性、可接受性及主动参与性等因素。在黑龙江省科技攻关重点项目支持下,针对应用需求,对上肢机器人专用faulhaber电机系统设计、上肢机器人专用faulhaber电机的表面肌电控制、上肢机器人专用faulhaber电机的力控制及偏瘫上肢训练策略等方面进行研究,为机器人专用faulhaber电机系统设计及训练奠定理论及技术基础。首先以人体上肢解剖学及运动理论为依据,从的安全性、有效性、实用性及舒适性角度提出对上肢机器人专用faulhaber电机机构、控制、传感器等方面的设计要求。
对变质心四轮月球探测车移动性能进行分析。基于改进的轮地接触力学,建立变质心情况下月球探测车的越障性能、爬坡性能的力学模型,确定变质心月球探测车质心位置与其越障性能和爬坡性能之间的关系,为变质心四轮月球探测车移动性能的研究提供理论参考。开展质心位置对变质心四轮月球车的移动性能影响的试验研究,主要包括对越障和爬坡方面的移动性能的影响,通过实验得出质心位置的变化对四轮月球探测车移动性能的影响关系。对钢丝绳式差动装置的性能进行试验,验证钢丝绳式差动装置的有效性和正确性。"三旋翼航模飞行姿态的智能控制研究比起式,旋翼式飞行器因为有着耗能少、稳定性强、成本少等优势,成为研究的热点。其中三旋翼式飞行器比起其他类型的旋翼式飞行器结构更为简单、耗能更少、造价更低,因此有着良好的应用前景和实用价值。